“这次挑战成功给了整个行业和小鹏汽车内部巨大的信心!”3月31日,在小鹏汽车NGP 广州-北京3000公里远征挑战成果分享会上,小鹏汽车董事长兼CEO何小鹏难掩心中的激动。这次挑战成功后,小鹏汽车宣布其NGP为“量产最强的自动驾驶类功能”。
在实现了这个小目标之后,何小鹏又当场立下了一个新的flag:到2025年之前实现高等级自动辅助驾驶,不光要做到中国最好,还要做到全球领先。这比他原先预计的要提早3年时间。

小鹏汽车董事长兼CEO 何小鹏
何小鹏的兴奋可以理解,这次挑战是小鹏汽车的一小步,也是中国品牌智能电动车的一大步,尤其是从与特斯拉——中国智能电动车初创公司最早的老师和现在的对手——的竞争关系来说更是如此。五年前,这些中国品牌只能仰视特斯拉,但现在则有机会平视它,即使是面对特斯拉最强大的自动驾驶技术。
在蔚来、理想汽车和小鹏汽车这三家造车新势力头部阵营中,小鹏汽车的自动驾驶技术发展最快,其专注于智能化的发展战略也被认为是最接近特斯拉的。目前,小鹏NGP的渗透率(已激活 NGP 功能的车辆中,使用了 NGP 的里程占可用该功能的里程的比例)超过50%,如果算上XPliot2.5,渗透率超过90%,远远超过特斯拉NOA。
从此次挑战的最终数据来看,小鹏NGP的可靠性、稳定性和易用性都全面超越了特斯拉NOA,凸显小鹏汽车在自动驾驶领域与特斯拉的距离越来越近,虽然特斯拉由于没有高精地图的支持而在某些场景下比较“吃亏”。
真实路况+真实场景+量产技术挑战
3月19日,小鹏NGP 3000公里挑战活动开始,媒体、车主等228位体验者驾驶小鹏P7从广州出发,历经3675公里,连续8天穿越10座城市,以每天接力的方式,基于NGP(Navigation Guided Pilot)自动导航辅助驾驶完成了行业内首个真实路况的自动驾驶长途挑战。
此次活动共收集有效记录数据110份,平均单车NGP行驶里程2930公里,变道超车总次数6245次,通过匝道总次数1215次,通过隧道总次数1308次。
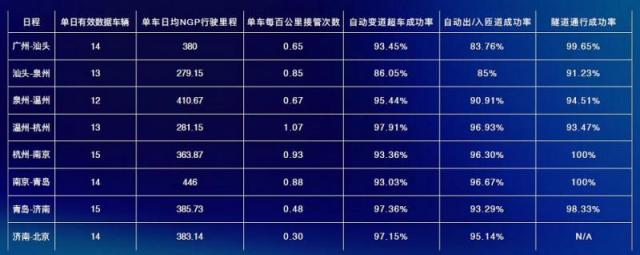
数据来源:小鹏汽车
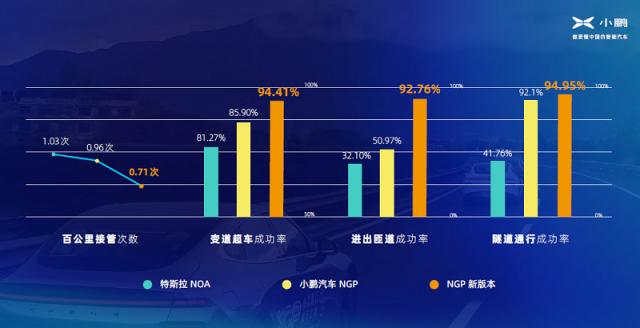
此次挑战经历了大雾、暴雨等极端天气以及堵车、交通事故、夜间行车等复杂路况,而且每个驾驶员的驾驶状态也不尽相同。最终的结果显示,小鹏NGP全程实现了平均百公里接管次数为0.71次,变道超车成功率94.41%,匝道通过成功率92.76%,隧道通过成功率94.95%。
EV世纪参与了南京-济南段的挑战,从实际的感受来说,小鹏NGP在高速公路上的驾驶辅助的作用非常明显,能够显著缓解长途驾驶的疲劳,而且整个系统的表现非常稳定,可靠性也很好,是可以让驾驶员放心使用的辅助驾驶系统。
首先,系统对于各项自动操作的提示、提醒或者警示做得都比较到位,因此可以让驾驶员比较快的熟悉、适应这套系统(在正式开启之前,驾驶员必须先观看关于自动驾驶和小鹏NGP的一段视频,然后通过一个测试确保驾驶员对于自动驾驶技术有最基本的了解之后才能开启此功能)。
系统与驾驶员交互的手段包括语音、仪表盘和中控大屏的提示画面、安全带的张紧等手段。这些提示非常必要,尤其是NGP功能即将退出或者遭遇突发情况时,可以让驾驶员及时接管车辆避免发生意外。
其次,车速和车距的控制、变道超车、上下匝道、进出隧道等几项主要功能完成得都比较好。这里面包括几个层面,比如加速减速的时机和力度的控制、变道时机的选择、完成变道时间的长短、上下匝道时何时离开主路并入最右侧道路等等。在这些方面,我的总体感觉是小鹏NGP这套系统是比较注重效率的,或者说是比较“大胆”的。
如果当前车道内前车速度较慢,相邻车道车流比较稀少,系统就会择机变道超车,当然前提是不超过限速,但也不会像有些人开车时那样不停的在各个车道间变来变去。整个挑战过程中我总共体验了200多公里,总体来说,对于变道频次还是比较满意的,没有出现一条道跑到黑的情况,如果真是那样,就不能叫自动导航辅助驾驶了。
整个变道的过程也很短,如果系统判断具备变道条件,在进行语音和画面提示后马上就会转动方向盘开始变道(此时驾驶员需要保持注意力集中,从后视镜中查看目标车道后方是否有车辆快速接近,如果有,变道过程可能会自动中止,车辆重新驶回当前行驶车道),并入目标车道的过程中车速并不会降低,整个过程干脆利落,和人工驾驶没有任何不同。
上下匝道时的效率也比较高,不会在离匝道入口很远时就并入最右侧车道,我观察了几次,如果最右侧车道车辆不多,最晚在距离出口200米左右提示即将出匝道,然后并入最右侧车道。之所以说效率高,是因为在我体验过程中第一次出匝道时,刚进入匝道还进行了一次变道超车。
相比出匝道,从匝道并入另一条高速公路的主路时难度相对较大,但也成功的完成了这个动作。
超越大货车时,系统会有意与大货车保持横向的安全车距,尤其是大货车并未在其车道内居中行驶并且偏向于本车时。当我驾驶的小鹏P7几次从左侧车道超越大货车,经过大货车时,系统会向在本车道内向左侧修正方向,而不再保持车道居中。
在我大半天的体验中,出现了两次意外情况。一次是行驶中前方路面上有一些遗洒,其中有一块比较大的轮胎胎壁,这属于静止物体,系统没有反应,似乎打算直接压过去,这时我踩了刹车,然后减速通过。另外一次是本车正常巡航,右侧车道有一辆车快速向左并线进入我们的车道,由于两车距离较近,系统紧急通过语音和中控大屏画面提醒刹车减速,同时安全带持续快速、小幅的张紧。这时候心里多少有些紧张,不过还没等我踩刹车,系统已经自动减速了。
小鹏NGP全面超越特斯拉NOA?
在此次挑战中,也有三家媒体做了小鹏NGP与特斯拉NOA的对比测试,他们驾驶的小鹏P7搭载的是今年1月份发布、小鹏车主目前正在使用的NGP版本。上文提到的228位媒体和用户体验的则是即将于二季度发布的NGP版本。

数据来源:小鹏汽车
最终结果显示,小鹏NGP全面超越了特斯拉NOA,而且即将于二季度发布的新版本的表现更佳。首先,小鹏NGP的可使用里程比特斯拉NOA更长,说明它能适应的场景更多。其中,郑州-北京段途中遇到大暴雨,NOA在这种情况下无法开启,因此,在其中一个媒体选择的路线上,特斯拉NOA的可使用里程只有60%。
数据来源:小鹏汽车
综合来看,据小鹏汽车自动驾驶中心产品总监黄鑫介绍,在百公里接管次数方面,特斯拉NOA是1.03次,小鹏NGP是0.96次,NGP新版本是0.71次。变道超车成功率方面,特斯拉NOA只有81.27%,小鹏NGP是85.90%,NGP新版本达到了94.41%。
而在进出匝道成功率和隧道通行成功率两项指标方面,特斯拉NOA的表现更是大幅落后于小鹏NGP。进出匝道是指从一条高速公路的任何一条车道上驶离进入匝道,在匝道上行驶一段后再成功进入另外一条高速公路的过程,在匝道上可能会经过不止一个Y字型路口,非常复杂。而隧道内没有GPS定位,有的隧道也比较长。因此,这两个场景都是比较复杂的,特斯拉NOA由于高精地图的支持,所以在进出匝道和隧道通行成功率方面的表现远不如小鹏NGP。
不过,从另外一个方面来考虑,小鹏NGP对高精地图的依赖度确实非常高,但高精地图又存在不少问题,比如,不覆盖收费站和高速服务区,而且时不时会有断点,有的路段甚至会出现本侧道路没有高精地图,但对向车道有地图的情况。另外,有些路段的虚实线与地图所显示的并不相符。
又比如,此次挑战中途径的几处路段都出现了锥桶,有的是正在修路,有的是工程已经结束但锥桶尚未移出,但我发现不是所有的锥桶都会显示在地图中,只有那些地图本身标注了修路信息路段的锥桶才会显示。通过这些情况不难发现小鹏NGP对高精地图的依赖作用。不过,如果行驶中前方高精地图消失,小鹏NGP的解决方案是系统自动降级为LCC,车辆仍然会在本车道内正常巡航。
快速迭代:从高速NGP到城市NGP
自2020年1024小鹏汽车智能日前夕,NGP工程版首次接受部分媒体体验后至正式向用户开放,小鹏NGP经历了12次大版本迭代以及91次小版本迭代。我们此次体验的最新版本也即将正式上线。
目前,小鹏NGP还只能覆盖部分高速公路和城市快速路,何小鹏表示,小鹏汽车今年下半年和明年推出的车型将具备城市NGP功能,但他没有解释将如何实现城市NGP。
EV世纪判断,预计高德地图将向小鹏汽车开放部分城市道路的高精地图,这是小鹏NGP功能的基础。据EV世纪了解,高德、百度等图商已经完成了国内所有高速公路和大部分城市快速路的高精地图绘制,有些城市道路高精地图也完成了采集。
另外,激光雷达的加入将进一步提高车辆的感知能力,拓展NGP功能的边界,因为激光雷达扫描外界环境后创建的3D地图也有助于NGP功能在城市道路上使用。

即将于2021上海国际车展亮相的小鹏汽车第三款车型P5将搭载2颗激光雷达。据了解,从小鹏汽车近日发布的P5的激光雷达位置图判断,前保险杠两侧将各放置1颗激光雷达。
何小鹏表示,P5将是第一款全球量产带激光雷达的智能车,能适应更多复杂场景,安全、可靠和鲁棒性更好。
平视之后的平行发展
特斯拉如何看待小鹏汽车公布的NGP和NOA的对比结果呢?EV世纪试图联系特斯拉对外事务副总裁陶琳,但未获回应。不过,一位前特斯拉员工向EV世纪表示,特斯拉与小鹏在自动驾驶上的策略不一样,特斯拉的解决方案只依靠视觉和神经网络,即使没有路也可以开。而小鹏汽车目前还只是自动驾驶的入局者,之所以要使用高精地图和激光雷达,就是为了确保自己可以坐在牌桌上。
但特斯拉的视觉方案并非主流。很多国内外主机厂和自动驾驶公司多认为如果要实现L3级以上的自动驾驶,就必须要借助激光雷达和高精地图。清华大学车辆与运载学院创院院长、清华丰田自动驾驶联合中心主任杨殿阁教授向EV世纪表示,主要依赖摄像头的视觉方案肯定有其局限性,多种传感器的融合感知能够弥补这些局限。既然可以用激光雷达,为什么不用呢?
从自动驾驶技术的长期发展来看,小鹏汽车等中国造车新势力与特斯拉的路线已经截然不同,前者更看好多传感器融合+高精地图的方向(中国的智能网联汽车发展总体方向也是基于单车智能的车路协同),后者则坚定认为不依赖其他辅助手段的纯视觉解决方案才是未来。未来这两种方案谁能胜出仍有待观察。
而从智能汽车和人类未来出行长远的发展来看,我们也希望中国车企能有更多颠覆式的创新。这方面,何小鹏也卖了一个关子。他说智能化不止自动驾驶,2025年之后,自动驾驶只是汽车智能化的一部分,未来会有多种智能改变人类的出行,但他没有详细解释。不过,我们很快可以看到的是小鹏的飞行汽车。今年年底,用户就可以在广州体验小鹏的第五代飞行汽车的demo版。





